
I am a Master student in the School of Electrical Engineering at KAIST, advised by Prof. Hyun Myung.
I am interested in Computer Vision, Robotics, and Embodied AI, focusing on building machines that percepts, reason, and interact with the physical world.
Previously, I completed my Bachelor's degree in Electrical Engineering at KAIST.
Email: alvinjinsung [at] kaist [dot] ac [dot] kr
Office: RM3237, E3-2, 291, Daehak-ro, Yuseong-gu, Daejeon, Republic of Korea.
Research Interests
My research goal is to advance robotics system to perceive the physical world in a way that is similar to how humans do.
Specifically, I am interested in learning representations of the physical world through uncertainty-aware perception and action, and aligning them with human expectations.
To this end, I am currently focusing on the following topics, but not limited to:
- Neural 3D Reconstruction
- Implicit Neural Representations
- Embodied AI
- 3D Scene Understanding
- Active Perception
News
Publications
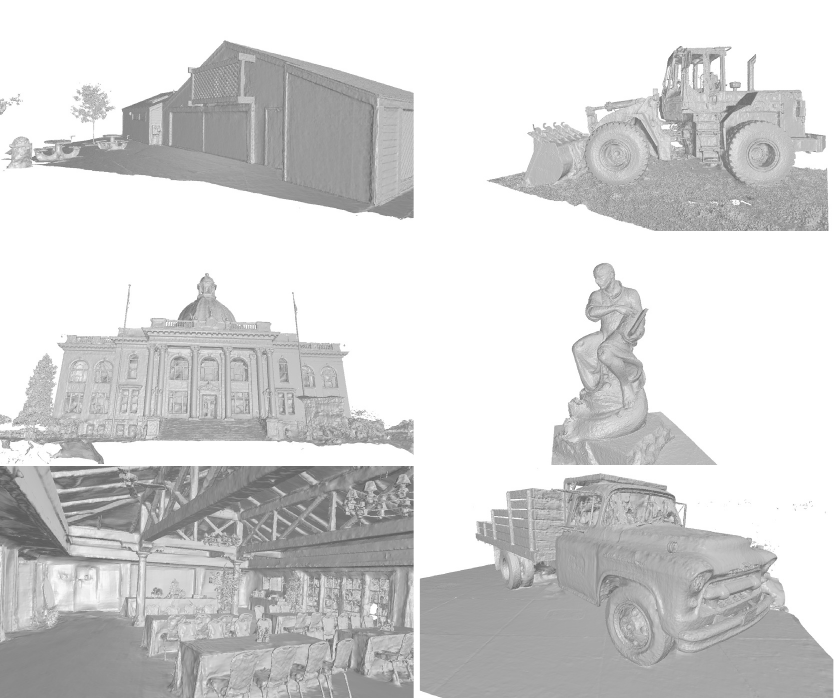 NeuDonatello: Uncertainty-Aware SDF Learning for High-Hidelity Neural Surface Reconstruction
NeuDonatello: Uncertainty-Aware SDF Learning for High-Hidelity Neural Surface Reconstruction
, Wanhee Kim, Taeyun Kim, Dasol Hong, Wooju Lee, Hyun Myung
CVPR 2026 (Under Review)
Webpage •
Paper (Coming Soon) •
Code (Coming Soon)
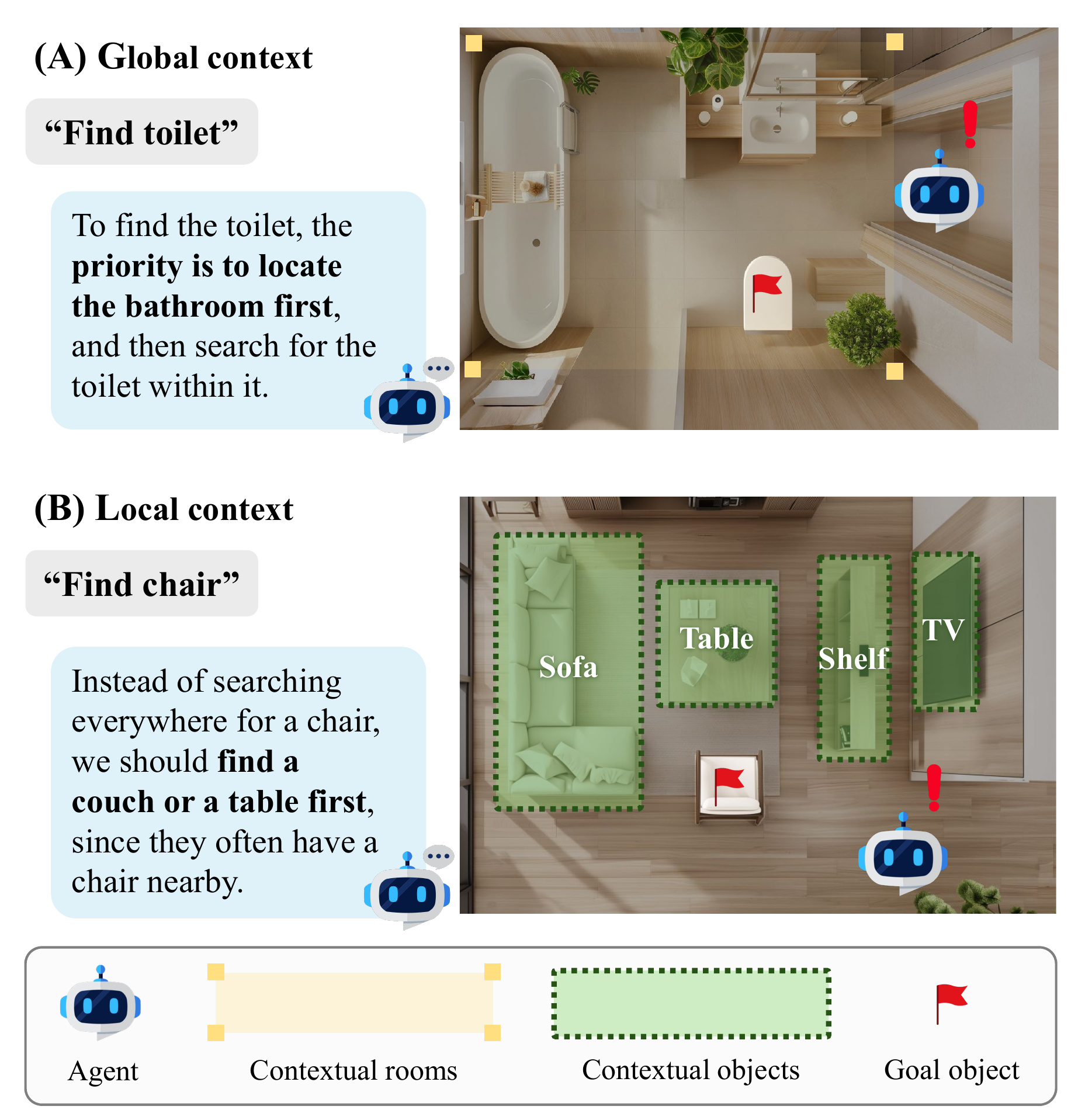 CLUE: Adaptively Prioritized Contextual Cues by Leveraging a Unified Semantic Map for Effective Zero-Shot Object-Goal Navigation
CLUE: Adaptively Prioritized Contextual Cues by Leveraging a Unified Semantic Map for Effective Zero-Shot Object-Goal Navigation
Taeyun Kim, , Dasol Hong, Hyun Myung
ICRA 2026 (Under Review)
Webpage •
Paper (Coming Soon) •
Code (Coming Soon)
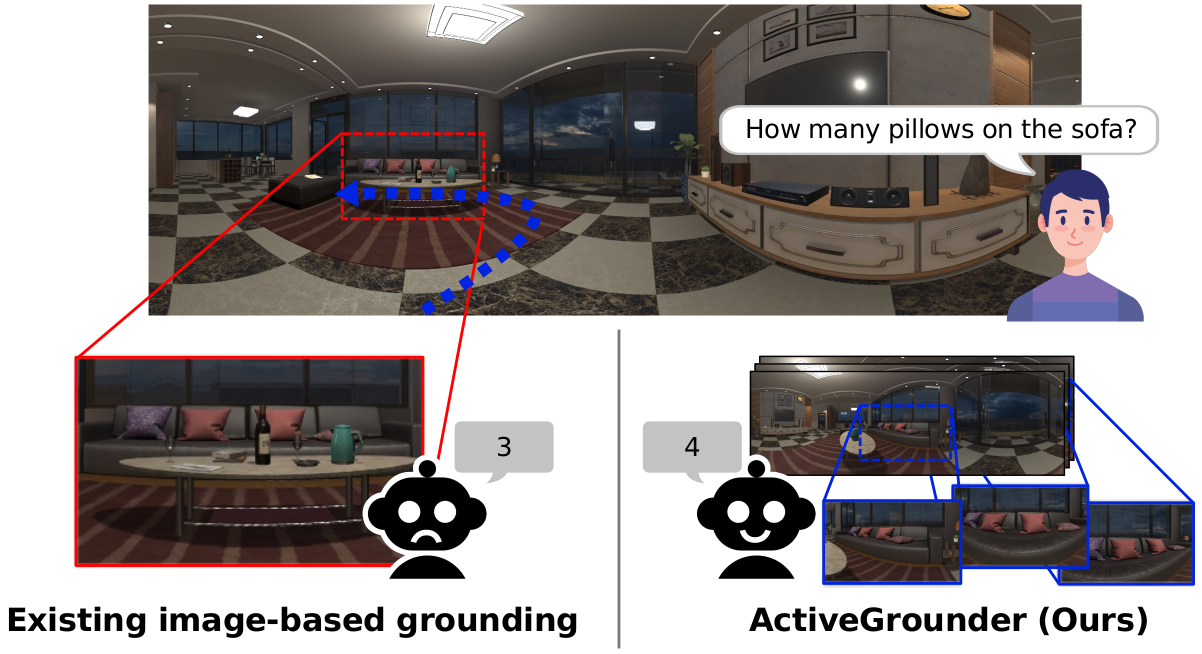 ActiveGrounder: 3D Visual Grounding with Object-Hull-Guided Active Observation
ActiveGrounder: 3D Visual Grounding with Object-Hull-Guided Active Observation
Dasol Hong, Juhye Park, Taeyun Kim, Jeewon Kim, Jei Kong, Wanhee Kim, , Wooju Lee, Hyun Myung
Humanoids 2025 Workshop on Bridging Humanoid Robotics and Foundation Models
Webpage
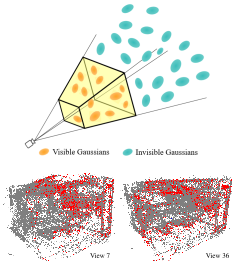 GSDB: A Lightweight Database for Gaussian Splatting Map-based Visual Localization Leveraging Edge-aware and Quality-guided View Filtering
GSDB: A Lightweight Database for Gaussian Splatting Map-based Visual Localization Leveraging Edge-aware and Quality-guided View Filtering
Sungjae Shin, Wanhee Kim, , Hyun Myung
ICCAS 2025
Best Paper Award •
Webpage •
Paper (Coming Soon) •
Code (Coming Soon)
Projects
 Vision-Language-Autonomy: CMU VLA Challenge on IROS'25 Workshop on AI Meets Autonomy (4th place)
Vision-Language-Autonomy: CMU VLA Challenge on IROS'25 Workshop on AI Meets Autonomy (4th place)
Dasol Hong, Juhye Park, Taeyun Kim, , Jeewon Kim, Jei Kong, Wooju Lee, Hyun Myung
IROS'25 Workshop on AI Meets Autonomy: CMU VLA Challegne (4th place)
Webpage •
Code